大型机器人昆虫揭示了昆虫运动的力感应秘密
研究人员将研究与真实昆虫和机器人昆虫相结合,以更好地了解它们在行走时如何感知四肢的力,为昆虫的生物力学和神经动力学提供新的见解,并为大腿机器人的新应用提供信息。
钟形感器 (CS) 是昆虫四肢中发现的力感受器,可对压力和应变做出反应,为控制运动提供重要信息。类似的力感受器存在于被称为高尔基腱器官的哺乳动物中,这表明了解力传感器在昆虫中的作用也可能为它们在人类等脊椎动物中的功能提供新的见解。
西弗吉尼亚大学斯塔特勒工程与矿产资源学院机械与航空航天工程系助理教授 Szczecinski 博士说:“我研究力传感器在行走昆虫中的作用,因为这些传感器对于成功运动至关重要。”。“他们提供的反馈对于正确的姿势和协调至关重要。”
与计算机模型相比,构建机器人模型的好处包括对运动部件之间的摩擦进行更真实的建模,以及包含发送神经信号的延迟。机器人肢体还具有能够记录每个信号的发送和接收以及由此产生的机械动作的优点,这对于动物来说是不可能的。
“行走本质上是一项机械任务,因此了解行走的神经控制需要同时研究力学和神经控制,”Szczecinski 博士说。“功能正常的步行机器人可以作为机器的原型,帮助人们在极端地形中耕作、探索其他星球,或者穿过森林来监测他们的健康状况。”
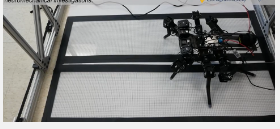
Szczecinski 博士有两个主要的研究机器人:第一个是基于果蝇(Drosophila melanogaster)的仿生机器人,它用 6 条腿行走,使团队能够全面了解钟形感器如何监测行走时的力。另一个机器人是单腿,可以简化模拟昆虫一条腿行走时的感官体验。
Szczecinski 博士还通过隔离真实昆虫的四肢并在施加不同力时用电极监测感觉通路来探索 CS 在真实昆虫中的作用。然后,这些记录的感官信号被用来开发机器人腿的模型。
“通过记录它们对许多不同信号的反应,我们可以更清楚地了解它们如何将力量转化为神经活动,”什切青斯基博士说。“我们使用许多不同的刺激,因为 CS 具有高度动态性,并且始终适应所施加的力。”
什切青斯基博士的研究揭示了真正的昆虫和机器人昆虫之间存在很强的相关性。“我们发现,对于我们检查的每种昆虫物种,我们的模型都同样能够很好地描述 CS 将力转化为神经活动的方式,”Szczecinski 博士说。“这表明每个物种的器官大致以相同的方式发挥作用。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
QQ多米试驾线下预约活动为了让更多用户感受QQ多米的独特魅力,我们特别推出了线下试驾预约活动。这不仅是一次...浏览全文>>
-
阜阳长安启源A07以其卓越的性能和豪华配置吸引了众多消费者的目光。作为一款定位高端市场的新能源车型,长安启...浏览全文>>
-
【安徽淮南大众CC新车报价2025款大公开】大众CC作为一款兼具运动感与豪华质感的轿跑车型,一直深受消费者喜爱...浏览全文>>
-
2025款长安猎手K50在安徽淮南地区的最新价格已新鲜出炉,为准备购车的朋友带来全面解析。这款车型以其高性价比...浏览全文>>
-
在安徽滁州购买长安猎手K50时,了解其落地价和省钱技巧至关重要。长安猎手K50是一款实用性强的皮卡车型,适合...浏览全文>>
-
途锐新能源是大众旗下的一款高端插电混动SUV,目前在安徽阜阳地区有售。其官方指导价约为58万元起,但实际成交...浏览全文>>
-
2025款大众CC作为一款兼具运动与豪华的中型轿车,备受关注。目前市场指导价大约在25万至35万元之间,具体价格...浏览全文>>
-
2024款探岳X作为一款备受关注的中型SUV,在市场上以其时尚的设计和出色的性能吸引了众多消费者。根据最新市场...浏览全文>>
- QQ多米试驾线下预约
- 安徽滁州长安猎手K50落地价,买车省钱秘籍
- 淮南大众CC新款价格2025款多少钱?买车攻略一网打尽
- 瑞虎8 PRO试驾,畅享豪华驾乘,体验卓越性能
- 安徽阜阳长安启源A05多少钱 2025款落地价,换代前的购车良机,不容错过
- 保时捷Macan试驾的流程是什么
- 安徽淮南大众ID.3多少钱?购车攻略在此
- 阜阳揽巡落地价,豪华配置超值价来袭
- 安徽池州威然 2024新款价格与配置的完美平衡
- 奇瑞瑞虎9试驾,新手必知的详细步骤
- QQ多米价格,换代前的购车良机,不容错过
- 池州迈腾GTE新款价格2022款多少钱?选车秘籍与优惠全公开
- 岚图追光多少钱 2024款落地价走势,近一个月最低售价25.28万起,性价比凸显
- 天津滨海威然 2024新款价格,最低售价28.98万起,入手正当时
- 蚌埠途昂新款价格2025款多少钱?购车必看
- 坦克400预约试驾全攻略
- 天津滨海ID.7 VIZZION价格,各配置车型售价全揭晓,性价比之王
- 安庆帕萨特最新价格2025款,最低售价12.35万起,入手正当时
- 亳州宝来新款价格2025款多少钱?选车指南与落地价全解析
- 生活家PHEV 2025新款价格,最低售价63.98万起现在该入手吗?