高速人工智能无人机超越世界冠无人机赛车手
还记得 1996 年 IBM 的深蓝 (Deep Blue) 在国际象棋比赛中战胜加里·卡斯帕罗夫 (Gary Kasparov),或者 2016 年谷歌的 AlphaGo 在围棋这一更为复杂的游戏中击败了顶级冠李世石 (Lee Sedol) 吗?这些机器战胜人类冠的比赛是人工智能历史上的重要里程碑。现在,苏黎世大学和英特尔的一组研究人员创造了一个新的里程碑,推出了第一个能够在无人机竞赛等体育运动中击败人类冠的自主系统。
名为 Swift 的人工智能系统在第一人称视角 (FPV) 无人机竞赛中赢得了与三名世界级冠的多场比赛,飞行员以超过 100 公里/小时的速度驾驶四轴飞行器,同时佩戴与机载连接的耳机远程控制它们相机。
通过与物理世界互动来学习
“体育运动对人工智能来说更具挑战性,因为它们比棋盘游戏或视频游戏更难预测。我们对无人机和环境模型没有完美的了解,因此人工智能需要通过与物理世界的交互来学习它们,”苏黎世大学机器人和感知小组的负责人 Davide Scaramuzza 说道。无人机竞速队队长。
直到最近,自主无人机飞过跑道所需的时间是人类驾驶无人机的两倍,除非它们依靠外部位置跟踪系统来精确控制其轨迹。然而,斯威夫特对机载摄像头收集的数据做出实时反应,就像人类赛车手使用的那样。其集成惯性测量单元测量加速度和速度,而人工神经网络则使用摄像头的数据来定位无人机在太空中的位置并检测赛道沿线的大门。该信息被馈送到控制单元,该控制单元也基于深度神经网络,该网络选择最佳动作以尽快完成电路。
在优化的模拟环境中进行培训
Swift 在模拟环境中接受训练,通过反复试验自学飞行,使用一种称为强化学习的机器学习类型。模拟的使用有助于避免在系统经常崩溃的学习早期阶段摧毁多架无人机。“为了确保模拟器中动作的结果尽可能接近现实世界中的结果,我们设计了一种用真实数据优化模拟器的方法,”该论文的第一作者 Elia Kaufmann 说。在此阶段,得益于外部位置跟踪系统提供的非常精确的位置,无人机可以自主飞行,同时还记录来自摄像机的数据。通过这种方式,它学会了自动纠正在解释来自机载传感器的数据时产生的错误。
人类飞行员仍能更好地适应不断变化的条件
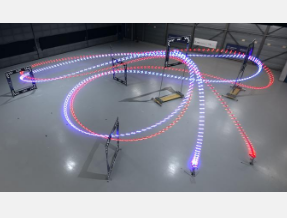
经过一个月的模拟飞行时间(相当于台式电脑上不到一个小时),Swift 已准备好挑战其人类竞争对手:2019 年无人机竞速联盟冠 Alex Vanover、2019 年 MultiGP 无人机竞速冠 Thomas Bitmatta 和三位——次瑞士冠马文·谢珀 (Marvin Schaepper)。比赛于 2022 年 6 月 5 日至 13 日期间在苏黎世附近杜本多夫机场机库的专用赛道上举行。赛道面积为 25 x 25 米,有七个方形大门,必须按照正确的顺序通过才能完成一圈,其中包括具有挑战性的动作,包括 Split-S,这是一种需要将无人机半滚动并执行操作的杂技动作全速下降的半环。
总体而言,斯威夫特取得了最快圈速,比人类飞行员的最佳圈速领先半秒。另一方面,事实证明,人类飞行员比自主无人机更具适应性,当条件与训练目的不同时,例如房间内光线过多,自主无人机就会失败。
斯卡拉穆扎指出,挑战自主飞行的极限比无人机竞赛更重要。“无人机的电池容量有限;他们需要大部分能量才能保持在空中。因此,通过飞得更快,我们可以增加它们的效用。” 例如,在森林监测或太空探索等应用中,快速飞行对于在有限的时间内覆盖大片空间非常重要。在电影行业,快速的自主无人机可用于拍摄动作场景。高速飞行的能力可能会对被派往着火建筑物内的救援无人机产生巨大影响。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
QQ多米试驾线下预约活动为了让更多用户感受QQ多米的独特魅力,我们特别推出了线下试驾预约活动。这不仅是一次...浏览全文>>
-
阜阳长安启源A07以其卓越的性能和豪华配置吸引了众多消费者的目光。作为一款定位高端市场的新能源车型,长安启...浏览全文>>
-
【安徽淮南大众CC新车报价2025款大公开】大众CC作为一款兼具运动感与豪华质感的轿跑车型,一直深受消费者喜爱...浏览全文>>
-
2025款长安猎手K50在安徽淮南地区的最新价格已新鲜出炉,为准备购车的朋友带来全面解析。这款车型以其高性价比...浏览全文>>
-
在安徽滁州购买长安猎手K50时,了解其落地价和省钱技巧至关重要。长安猎手K50是一款实用性强的皮卡车型,适合...浏览全文>>
-
途锐新能源是大众旗下的一款高端插电混动SUV,目前在安徽阜阳地区有售。其官方指导价约为58万元起,但实际成交...浏览全文>>
-
2025款大众CC作为一款兼具运动与豪华的中型轿车,备受关注。目前市场指导价大约在25万至35万元之间,具体价格...浏览全文>>
-
2024款探岳X作为一款备受关注的中型SUV,在市场上以其时尚的设计和出色的性能吸引了众多消费者。根据最新市场...浏览全文>>
- QQ多米试驾线下预约
- 安徽滁州长安猎手K50落地价,买车省钱秘籍
- 淮南大众CC新款价格2025款多少钱?买车攻略一网打尽
- 瑞虎8 PRO试驾,畅享豪华驾乘,体验卓越性能
- 安徽阜阳长安启源A05多少钱 2025款落地价,换代前的购车良机,不容错过
- 保时捷Macan试驾的流程是什么
- 安徽淮南大众ID.3多少钱?购车攻略在此
- 阜阳揽巡落地价,豪华配置超值价来袭
- 安徽池州威然 2024新款价格与配置的完美平衡
- 奇瑞瑞虎9试驾,新手必知的详细步骤
- QQ多米价格,换代前的购车良机,不容错过
- 池州迈腾GTE新款价格2022款多少钱?选车秘籍与优惠全公开
- 岚图追光多少钱 2024款落地价走势,近一个月最低售价25.28万起,性价比凸显
- 天津滨海威然 2024新款价格,最低售价28.98万起,入手正当时
- 蚌埠途昂新款价格2025款多少钱?购车必看
- 坦克400预约试驾全攻略
- 天津滨海ID.7 VIZZION价格,各配置车型售价全揭晓,性价比之王
- 安庆帕萨特最新价格2025款,最低售价12.35万起,入手正当时
- 亳州宝来新款价格2025款多少钱?选车指南与落地价全解析
- 生活家PHEV 2025新款价格,最低售价63.98万起现在该入手吗?