机器人如何协作达成共识
做出群体决策并不是一件容易的事,尤其是当决策者是一群机器人时。为了提高集体感知中的群体自主性,布鲁塞尔自由大学 IRIDIA 人工智能研究实验室的一个研究团队提出了一种创新的自组织方法,其中一个机器人一次临时充当“大脑”,代表其整合信息团体的。他们的论文于 9 月 13 日发表在《智能计算》(Science Partner Journal)上。在论文中,作者表明他们的方法通过减少不确定性来源来提高集体感知的准确性。
通过结合集中式和分散式控制的各个方面,作者在一个系统中实现了两者的好处,保持了分散式方法的可扩展性和容错性,同时结合了集中式方法的准确性。该方法使机器人能够了解它们在系统内的相对位置,并在某一点融合它们的传感器信息,而不需要全局或静态通信网络或任何外部参考。此外,作者的方法首次允许将来自多个传感器的信息融合的集中方法应用于自组织系统。多传感器融合技术以前仅在完全集中式系统中进行了演示。
作者针对三种基准方法测试了自组织层次方法,发现他们的方法在测试条件下在准确性、一致性和反应时间方面表现出色。在实验设置中,一群模拟无人机和地面机器人通过检测散布在竞技场中的物体来收集二维空间数据,并形成物体密度的集体意见。机器人必须依靠短程传感器来推断每个单元的物体数量。
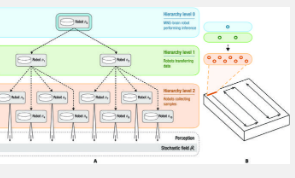
据作者称,这种新方法使用“动态临时分层网络”。它建立在一种称为可合并神经系统的通用框架上,其中层次结构的每个级别的机器人在决策过程中都有不同的角色,并且机器人可以根据需要改变它们的连接和相对位置,即使每个机器人都是仅限于与其直接邻居进行通信。
在作者的方法中,顶层的“大脑”机器人负责执行推理并向下游发送运动指令,而中层的机器人则管理数据传输并参与全局和局部运动目标的平衡(例如,在避障期间),并且大多数底层在管理局部运动的同时执行样本收集。
关于该主题的未来研究可能会研究先进的推理方法,并扩展采样方法在其他类型的机器人故障或具有挑战性的环境条件下的鲁棒性,例如具有大型障碍物或不规则边界的环境。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!